임효인 기자
임효인 기자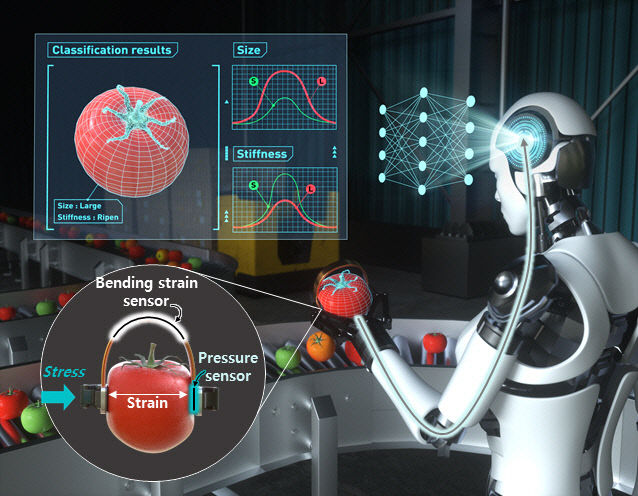 |
한국전자통신연구원(ETRI)은 지능형부품센서연구실 김혜진 연구팀이 유연한 멀티 모달 센서를 활용해 다양한 물체의 크기와 형상, 물성을 정확히 확인하고 인지해 효과적으로 제어할 수 있는 지능형 로봇 그리퍼를 개발했다고 5일 밝혔다.
연구팀이 개발한 기술은 여러 다른 감각이나 수단을 통해 정보를 수집·표현하는 멀티모달 센서를 활용해 감지소재와 전극 사이 에어갭을 미세하게 조절하며 압력과 굽힘센서의 감지 범위와 민감도를 선택적으로 조절할 수 있다. 이를 물건을 집는 그리퍼에 장착하고 물체에 가해지는 압력과 그리퍼의 굽힘 정도를 동시에 감지해 물체의 단단한 정도를 정확히 판단한다.
센서는 보호층과 인터페이스 공정을 최적화해 1만 번 이상의 반복 압력과 굽힘 반복 시험에도 안정적인 성능을 보였다.
연구진은 이 같은 멀티모달 촉각센서가 장착된 지능형 로봇 그리퍼를 통한 실험 결과 다양한 크기와 물성을 지닌 토마토 11종을 98.78% 정확도로 구분하는 데 성공했다. 시간에 따라 완숙 여부가 달라지는 토마토의 숙성도까지 실시간 선별해낼 수 있는 기술 수준이다.
이번 기술은 여러 기술이 모인 결과다. 대면적 고유연 다종센서 집적 기판 플랫폼을 비롯해 에어갭 구조 기반의 고유연 멀티모달 센서, 물체의 크기·형상·물성 등을 판멸하는 인공지능 알고리즘 모델, 로봇 그리퍼의 촉각 피드백 제어 기술 등이 결합됐다.
김혜진 ETRI 지능형부품센서연구실 책임연구원은 "개발한 촉각센서는 로봇 그리퍼에 다양한 촉각 기능을 부여해 자동화 라인과 협업 로봇 분야에서 혁신적인 응용 가능성을 제시한다"고 말했다.
연구진은 추후 압력과 굽힙을 감지하는 2종 센서 외에도 온도·습도센서, 관성센서, 거리센서 등을 하나의 센서 플랫폼으로 집적하는 기술을 개발할 예정이다. 또 다종 센서가 집적된 유연 인장형 멀티모달 인공피부를 로봇 그리퍼에 적용해 사람처럼 빠르고 자연스러운 동작이 가능한 차세대 지능형 그리퍼 기술도 개발할 계획이다.
임효인 기자
중도일보(www.joongdo.co.kr), 무단전재 및 수집, 재배포 금지



![[날씨] 이번 주말 많은 비…더위 서서히 꺾여](https://dn.joongdo.co.kr/mnt/webdata/content/2024y/09m/20d/78_2024092001001298400052641.jpg)





![[창간73-화합시대] 오상욱 "팀워크가 올림픽 금메달 원동력"](https://dn.joongdo.co.kr/mnt/images/webdata/content/2024y/09m/01d/85_2024090201000073500001521.jpg)