 김성현 기자
김성현 기자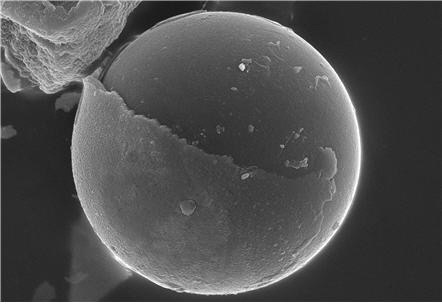 |
| 화학적 미세 수중로봇의 전자현미경 사진 |
한국원자력연구원은 해체기술연구부 박찬우 박사팀이 원격 제어로 방사성 폐수 속을 유영하면서 세슘을 감지·제거하는 화학적 미세 수중로봇을 개발했다고 19일 밝혔다.
방사성 폐수는 원자력시설의 운영·사고 등 다양한 상황에서 발생할 수 있으며, 폐수 속에는 세슘, 코발트 등 다양한 핵종이 포함돼 있다.
그 중에서도 방사성 세슘은 물에 잘 녹아 외부 유출 가능성이 높은 반면, 제거가 까다롭고, 반감기도 30여 년에 이른다. 또한 감마선을 방출하고 체내 흡수 시 근육 등에 축적될 수 있으며, 환경에 유출될 경우에는 장기간 생태계에 영향을 줄 수 있어 방사성 폐수 정화 과정에서 중요한 핵종 중의 하나다.
이번에 개발한 화학적 미세 수중로봇은 머리카락 두께의 1/10인 약 7㎛(마이크로미터) 크기여서 육안으로는 파우더처럼 보인다. 세슘을 흡착하는 페로시안화구리(copper ferrocyanide)를 입힌 이산화규소 마이크로입자가 기본 몸체인데, 입자의 한 쪽 면에는 백금 촉매와 니켈을 코팅해 운동 능력을 갖췄다.
방사성 폐수에 미세 로봇과 과산화수소를 함께 넣으면, 백금 촉매와 과산화수소가 화학적으로 반응하며 산소 방울이 생기는데, 이를 추진력으로 삼아 움직인다. 또, 자성을 가진 니켈의 특성을 이용해 외부에서 자기장으로 로봇의 이동을 제어할 수도 있다.
화학적 미세 수중로봇은 물 속에서 이동하며 방사성 세슘을 빠른 속도로 제거할 수 있어, 움직이지 않는 기존의 수동형 흡착제에 비해 세슘 제거 속도가 60배 빠른 것으로 나타났다. 폐수 속에 세슘과 비슷한 특성을 가진 나트륨과 같은 경쟁 이온이 존재하는 경우에도 98% 이상의 세슘을 성공적으로 제거해 폐수 정화에 소요 되는 시간을 크게 단축할 것으로 기대된다.
방사성 폐수의 특성상 작업자의 피폭을 예방하는 것이 특히 중요한데 이 로봇은 외부에서 자기장을 조절해 원격으로 제어할 수 있기 때문에 방사선 노출을 최소화할 수 있다. 또한 세슘 포획 후 미세 로봇만 회수하여 방사성폐기물로 분리·처분할 수 있어 효율적이다.
박찬우 박사는 "미세 수중로봇은 방사성 폐수 처리에 획기적인 발전을 가져올 수 있을 뿐 아니라 수계 환경 정화, 산업 폐수 정화 등에도 활용할 수 있다"며 "보다 더 친환경적인 추진체를 개발하고 원격제어기술을 보완하는 등 2023년 상용화를 목표로 연구를 보완해나갈 계획"이라고 밝혔다.
김성현 기자 larczard@
중도일보(www.joongdo.co.kr), 무단전재 및 수집, 재배포 금지

![[대전 자영업은 처음이지?] 지역상권 분석 18. 대전 중구 선화동 버거집](https://dn.joongdo.co.kr/mnt/webdata/content/2024y/11m/21d/버거1.jpg)
![[尹정부 반환점 리포트] ⑪ 충북 현안 핵심사업 미온적](https://dn.joongdo.co.kr/mnt/webdata/content/2024y/11m/21d/118_2024112101001603200062341.jpg)



![[기획]`대한민국의 스페이스X를 꿈꾼다`... 페리지에어로스페이스의 도전](https://dn.joongdo.co.kr/mnt/webdata/content/2024y/11m/20d/78_2024112001001447200056411.jpg)





![[2024 청양 풋살대회] `칠갑산의 기운을 받아 맘껏 기량을`](https://dn.joongdo.co.kr/mnt/images/webdata/content/2024y/11m/22d/2024111801001224800047831.jpg)
![[2024 청양 풋살대회] `청양에서 모두 힐링의 시간을`](https://dn.joongdo.co.kr/mnt/images/webdata/content/2024y/11m/22d/2024111801001224100047771.jpg)




