 이해미 기자
이해미 기자 |
| K-FLEX를 조종기로 조작하는 모습 |
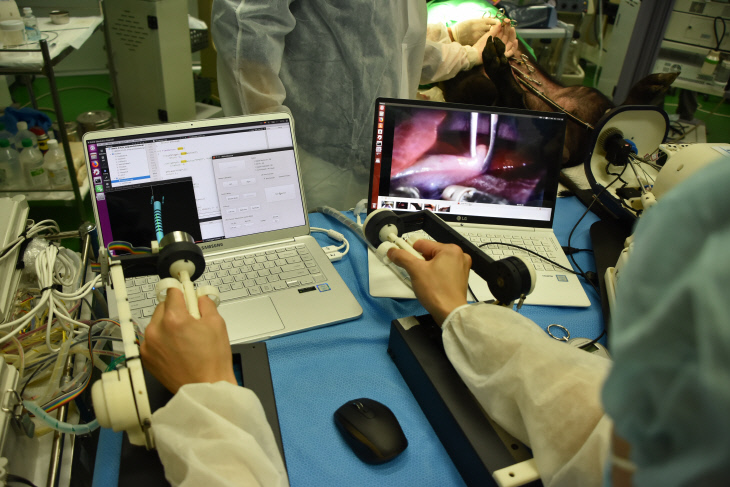 |
| K-FLEX 마스터 시뮬레이터 내시경 영상 |
연구팀은 지난달 17일 돼지를 통한 임상실험을 진행했다. 복강에 삽입된 유연 내시경 수술로봇을 이용해 담낭을 절개하는 실험으로 복강 내 로봇의 정밀 제어기술과 소형관절 설계기술이 핵심 기반기술이다.
이 연구를 통해 전량을 수입에 의존하던 국내 연성 내시경 시장의 활로 개척과 더불어 암 치료 관련 사회적 비용 축소 효과를 기대할 수 있을 것으로 전망된다.
연구팀의 케이-플렉스 로봇은 입이나 항문, 요도 등 우리 몸에 존재하는 통로를 따라 뱀처럼 유연하게 삽입돼 몸속을 자유롭게 관찰한다. 이상이 있는 경우 손가락처럼 생긴 초소형 로봇 팔이 나와 수술을 진행한다.
기존의 상용화된 수술 로봇은 곧은 수술 도구를 이용하고 복부에 3~4개의 구멍을 내야 하는 문제점이 있는 반면, 연구팀의 기술은 외부절개 없이 내부절개만으로 수술이 가능해 출혈량, 세균 감염, 합병증 등의 위험을 줄일 수 있다.
연구팀은 유연성과 소형화 문제도 해결했다. 핵심 연구원인 황민호 박사는 초소형 로봇 팔이 낼 수 있는 힘을 두 배 이상 끌어 올리는 동시에 크기도 절반으로 축소했다.
곧은 직선 형태의 수술 기술과 달리 유연 수술 로봇 기술은 전 세계적으로도 발전되지 않은 상황이다.
권 교수 연구팀은 내시경 모듈을 제외한 모든 부품과 소프트웨어를 순수 국내 기술을 통해 개발했다.
연구를 총괄한 권동수 교수는 “이번 실험의 의미는 국내 최초로 유연한 내시경 로봇을 살아있는 동물의 복강 내에서 이동시켜 병변에 접근시키고 수술을 진행함으로써 임상 적용의 가능성을 확인했다는 점”이라고 말했다.
이해미 기자 ham7239@
중도일보(www.joongdo.co.kr), 무단전재 및 수집, 재배포 금지
![[대전 자영업은 처음이지?] 지역상권 분석 18. 대전 중구 선화동 버거집](https://dn.joongdo.co.kr/mnt/webdata/content/2024y/11m/22d/버거1.jpg)

![[尹정부 반환점 리포트] ⑪ 충북 현안 핵심사업 미온적](https://dn.joongdo.co.kr/mnt/webdata/content/2024y/11m/21d/118_2024112101001603200062341.jpg)



![[기획]`대한민국의 스페이스X를 꿈꾼다`... 페리지에어로스페이스의 도전](https://dn.joongdo.co.kr/mnt/webdata/content/2024y/11m/20d/78_2024112001001447200056411.jpg)











