 이해미 기자
이해미 기자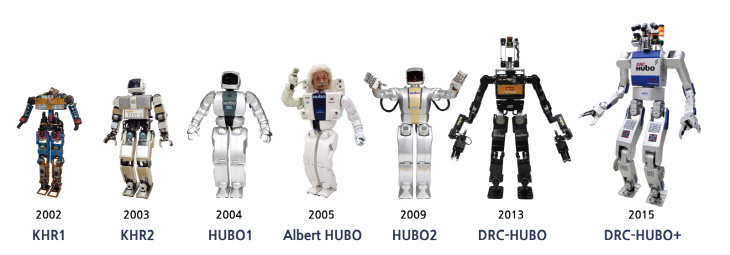 |
| 2002년부터 2015년까지 개발된 휴보. 사진=KAIST 휴보랩 |
 |
| 2018 평창동계올림픽서 성화 봉송을 하고 있는 휴보. 사진-KAIST 휴보랩 |
세계 최초 로봇 올림픽 성화 봉송 주자가 되어 두 발로 걷고 팔을 들어 성화를 전달하는 임무를 완수했다.
휴보(HUBO)는 휴머노이드와 로봇의 합성어로 국내 첫 인간형 로봇이다. KAIST 오준호 교수팀이 2002년부터 인간형 로봇 개발을 시작해 2004년 드디어 두 발로 걸을 수 있는 로봇을 만들어냈다. 시속 1.2㎞로 보행할 수 있고, 관절모터가 41개로 손가락 5개를 따로따로 움직일 수 있다.
KAIST의 로봇 연구는 꾸준히 성장하고 있다.
두 발로 걷는 인간을 닮은 휴보를 시작으로 운전을 하고, 차에서 내리고, 문을 열고 밸브를 잠그는 등 고난이도 동작도 척척 해낸다.
2015년 세계재난로봇대회에서 1위를 차지하며 세계 최고 재난 로봇이라는 타이틀까지 얻게 됐다. 이 대회는 일본 후쿠시마 원전 사고 발생 후 로봇을 재난 현장에서 활용하기 위한 대회였고, KAIST 휴보는 8가지 미션을 44분에 걸쳐 수행하며 로봇 강국인 일본과 미국을 제치고 우승했다.
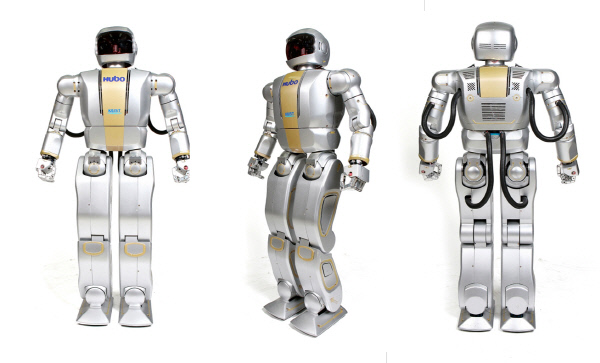 |
| hubo2. 사진=KAIST 휴보랩 |
HUBO는 세계에서 가장 유명한 휴머노이드 로봇이다. HUBO2는 휴보 시리즈의 최신 버전으로 2009년 개발됐다. 10년의 경험을 바탕으로 모션, 걷기, 달리기 등의 작업에서 향상된 로봇 시스템과 성능이 완성됐다. 초창기 1,2㎞ 속도에서 현재는 3.6㎞/h로 주행할 수 있다.
*DRC-HUBO
자연재해 및 인위적인 재난에 대응하기 위해 인간을 도울 수 있는 DRC-HUB가 개발됐다. 보행과 조작성 및 시각 인식에서 높은 성능을 자랑한다. 특히 무릎 바퀴를 사용해 2륜 자전거 모드에서 로봇 모드로 전환 할 수 있어 높은 이동성을 제공하고 있다. 직립자세와 무릎 자세로 변형이 가능하다.
이해미 기자 ham7239@
중도일보(www.joongdo.co.kr), 무단전재 및 수집, 재배포 금지
![[대전 자영업은 처음이지?] 지역상권 분석 18. 대전 중구 선화동 버거집](https://dn.joongdo.co.kr/mnt/webdata/content/2024y/11m/22d/버거1.jpg)

![[尹정부 반환점 리포트] ⑪ 충북 현안 핵심사업 미온적](https://dn.joongdo.co.kr/mnt/webdata/content/2024y/11m/21d/118_2024112101001603200062341.jpg)



![[기획]`대한민국의 스페이스X를 꿈꾼다`... 페리지에어로스페이스의 도전](https://dn.joongdo.co.kr/mnt/webdata/content/2024y/11m/20d/78_2024112001001447200056411.jpg)











